Developing a Robot to Sort Recyclables
The challenge for sustainable waste management begins from the sorting stage in homes, offices, and other public places, where trash is put into different bins - compost, recycle, and purely waste. While there are Materials Recycling Facilities (MRF) for sorting materials collected from the recycling bins, they are often ineffective due to “recycling contamination” from the sorting stage.
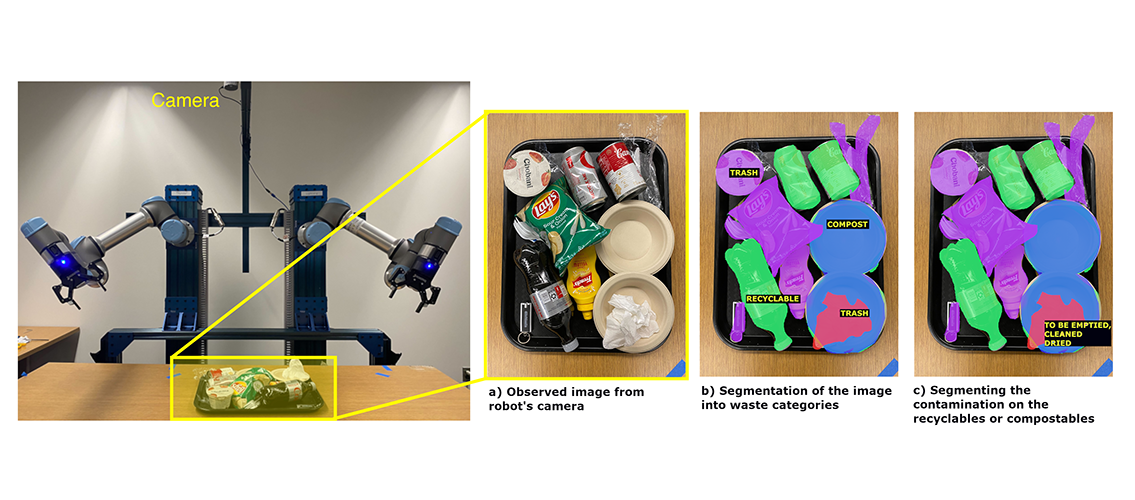
MSI PI Karthik Desingh (assistant professor, Computer Science and Engineering) is working on a project called “Sensing and Perceiving Recyclables for Robotic Sort-Empty-Clean-Drying Tasks,” that studies food waste contamination at the sorting stage (e.g., recyclable take-home food boxes, jars, and containers that have not been emptied or rinsed out). Negligence to not empty, clean, and dry (ECD) such recyclables make the recycling process less effective. This project aims to develop robotic technology to reduce food waste contamination and serve towards effective recycling. A robot with two arms can potentially sort trash following the ECD principles to maximize the value of recyclables. Professor Karthik and his group are aiming to develop such technology that would focus on sensing and perceiving the objects in the disposable stage, sorting them into respective categories, and emptying, cleaning, and drying recyclable categorical items before they go into the MRF. Part of the project is developing image segmentation algorithms that will take the image of the scene as input and output segments of waste categories.
This project received a Research Computing Seed Grant. As of September 2023, the RC Seed Grant programs have been revised into the DSI Seed Grant programs. DSI Seed Grants include many of the same goals as the old program, with a new emphasis on data science. Complete information about DSI Seed Grants, including application deadlines, can be found on the DSI website.